This command is used to construct a universal rate-dependent damping model.
Two ways to define URD damping are provided.
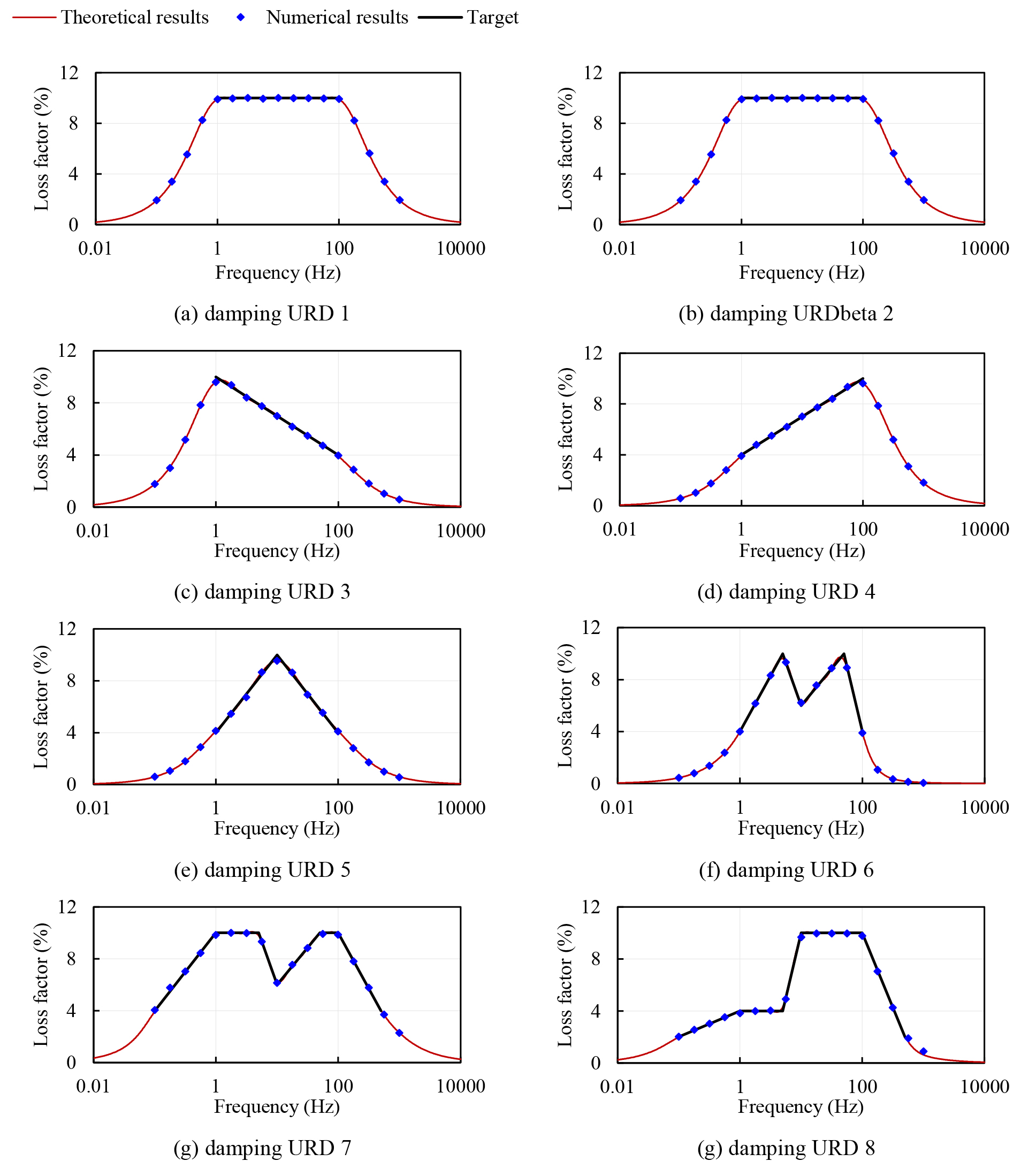
Approach 1 Only the target loss factor distribution is used. The command will calculate the best approximation using the least-squares approach. More details are provided in reference [1].
frequency of the j th frequency–loss factor pair (in units of T^−1)
$lossFactorj
float
loss factor of the j th frequency–loss factor pair
$Tlrnc
float
tolerance criteria (relative error) used when calculating the best approximation (optional: default is 0.05)
$Ta
float
time when the damping is activated
$Td
float
time when the damping is deactivated
$tsTagScaleFactorVsTime
integer
time series tag identifying the scale factor of the damping versus time
-print
string
argument to print the calculated optimal parameters for the URD damping
NOTE
The loss factor can be set to twice the viscous damping ratio. For example, if a viscous damping ratio of 0.05 is to be used, then the loss factor would be 2 * 0.05 = 0.1.
According to reference [1] , the following commands are equivalent.
Approach 2 Optimal parameters for URD damping are used. These parameters may be obtained using Matlab and other software to achieve the best approximation. More details are provided in reference [1].