3.1.10.53. LehighJoint2D Element
This command is used to construct a LehighJoint2D element object, which is a 2D planar element with 4 nodes, each having 3 degrees of freedom (DOFs) per node.
3.1.10.53.1. Command Lines
TCL:
- element LehighJoint2D $eleTag $iNode $jNnode $kNode $lNode $matTag1 $matTag2 $matTag3 $matTag4 $matTag5 $matTag6 $matTag7 $matTag8 $matTag9
Python:
- element('LehighJoint2D', eleTag, iNode, jNode, kNode, lNode, matTag1, matTag2, matTag3, matTag4, matTag5, matTag6, matTag7, matTag8, matTag9)
where:
Argument |
Type |
Description |
|---|---|---|
$eleTag |
integer |
Unique element object tag |
$iNode … $lNode |
integer |
Node tags |
$matTag1 |
integer |
Uniaxial material tag for horizontal extension |
$matTag2 |
integer |
Uniaxial material tag for vertical extension |
$matTag3 |
integer |
Uniaxial material tag for shear distortion |
$matTag4 |
integer |
Uniaxial material tag for beam flexure |
$matTag5 |
integer |
Uniaxial material tag for column flexure |
$matTag6 |
integer |
Uniaxial material tag for asymmetric beam flexure |
$matTag7 |
integer |
Uniaxial material tag for asymmetric column flexure |
$matTag8 |
integer |
Uniaxial material tag for beam varying shear distortion |
$matTag9 |
integer |
Uniaxial material tag for column varying shear distorsion |
Notes
The node tags shall be entered in a counter-clockwise order.
The uniaxial material tags represents one of the nine deformation modes present in the element depicted in the figure below.
The force-deformation relation in matTag3 is defined with tri-linear nonlinearity and all other force-deformation relations are modeled with linear behavior.
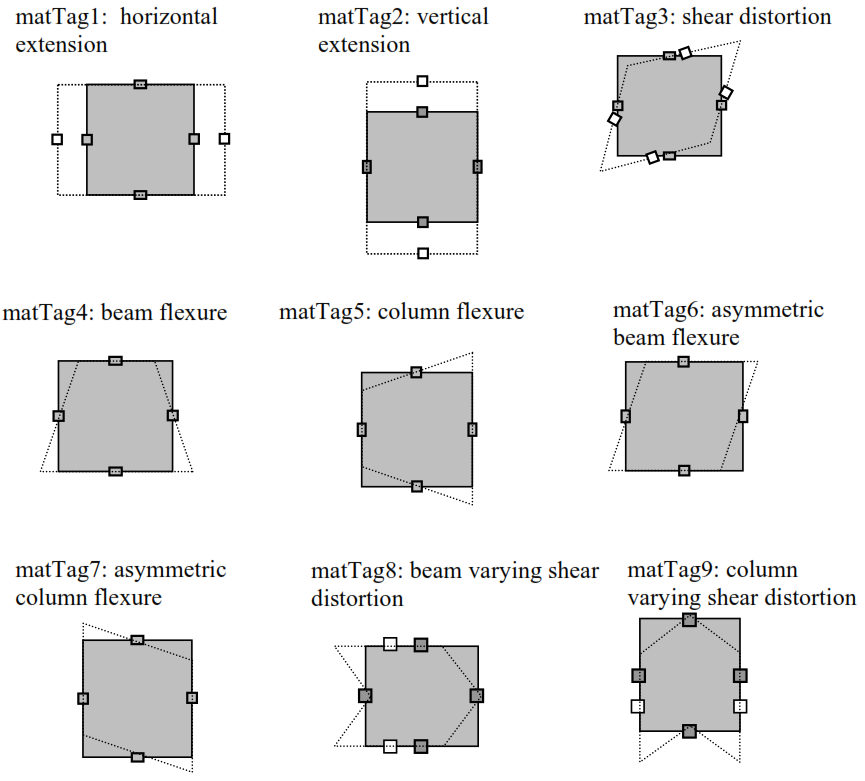
Fig. 3.1.10.29 LehighJoint2D Element: The deformation modes in the panel zone.
3.1.10.53.2. Examples
Command Lines
The following example constructs constructs a LehighJoint2D joint element with element tag 4, that is connected to nodes 2, 3, 4 and 5. The element uses uniaxial material object tags from 1001 to 1009 for the panel deformation modes.
Tcl
element LehighJoint2D 4 2 3 4 5 1001 1002 1003 1004 1005 1006 1007 1008 1009;
Python
element('LehighJoint2D', 4, 2, 3, 4, 5, 1001, 1002, 1003, 1004, 1005, 1006, 1007, 1008, 1009)
References
More information available in the following reference:
Karavasilis, Theodore & Seo, Choungyeol & Ricles, James. (2008). HybridFEM: A PROGRAM FOR DYNAMIC TIME HISTORY ANALYSIS OF 2D INELASTIC FRAMED STRUCTURES AND REAL-TIME HYBRID SIMULATION HybridFEM Version 4.2.4 User’s Manual.
C.Y. Seo, Y.C. Lin, R. Sause & J.M. Ricles (2009). Development of analytical models for 0.6 scale self-centering MRF with beam web friction devices. In: 6th International Conference for Steel Structures in Seismic Area (STESSA), Philadelphia. CRC Press, pp. 849-854.
The article from above is part of a conference proceedings book: Mazzolani, F., Ricles, J.M., & Sause, R. (Eds.). (2009). Behaviour of Steel Structures in Seismic Areas: STESSA 2009 (1st ed.). CRC Press. https://doi.org/10.1201/9780203861592
Code developed by: CY Seo.